The various electromagnetic based actuation(EMA) methods have been proposed for actuating microrobot. The advantage of EMA is that it can provide wireless driving to microrobot. In this reason a lot of researchers have been focusing on the EMA driven microrobot. This paper proposed a swimming microrobot driven by external alternating magnet field which is generated by two pairs of Helmholtz coils.
The microrobot has a fish-like shape and consists of a buoyant robot body, a permanent magnet, and a fin. The fin is directly linked to the permanent magnet and the magnet is swung by the alternating magnet field, which makes the propulsion and steering power of the robot. In this paper, firstly, we designed the locomotive mechanism of the microrobot boy EMA. Secondly, we set up the control system. Finally, we demonstrated the swimming robot and evaluated the performance of the microrobot by the experiments.
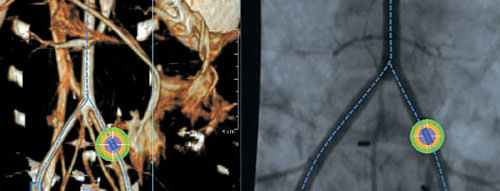
Jongoh Park, Intravascular Therapy Microrobot