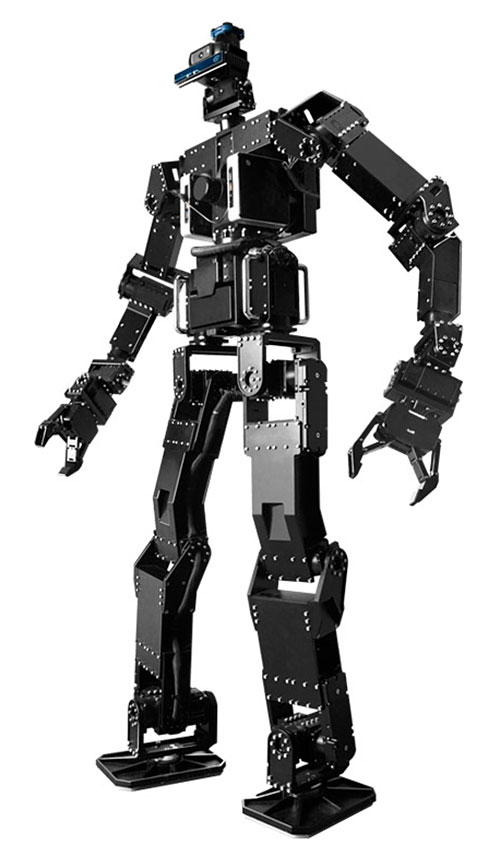
Full Size Humanoid Robot
THORMANG3 Introduction Video
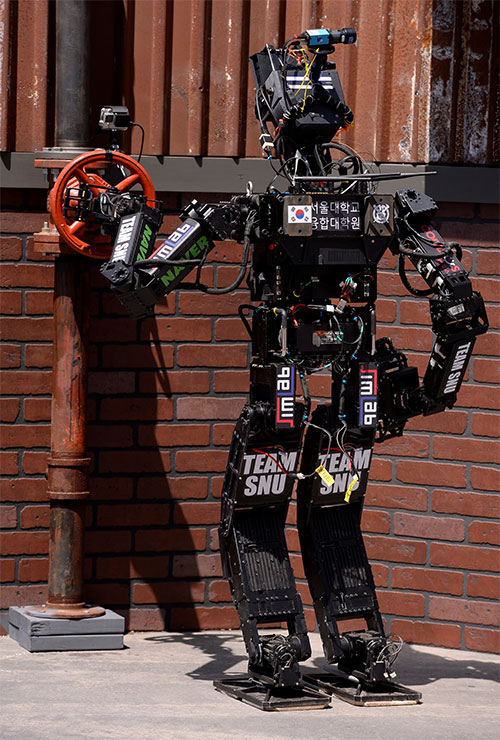
Team SNU (Seoul National University) is composed of three subgroups: Dynamic Robotic Systems Lab (DYROS Lab), Machine Intelligence & Pattern Analysis Lab (MIPAL Lab), and SimLab (private company). Team SNU uses THORMANG developed by ROBOTIS.
DYROS lab is in charge of control aspect of the robot and overall team management for DRC. The lab develops advanced intelligent robotic systems and their control algorithms so that they can interact with humans in our human environment. The main research areas are whole-body multi-contact control, robot–environment interaction, biomechanics, human motion analysis, compliant actuators, and robotic arts.
THORMANG3 Goes Shopping
Results at the DARPA Robotics Challenge Finals 2015
MIPAL works on perception part of the robot for Team SNU. MIPAL at Seoul National University studies a broad spectrum of subjects relevant to pattern recognition and machine learning using statistical analysis. MIPAL’s main area of interest includes object recognition, object detection, pattern classification, statistical data analysis, Image processing and Computer vision.
SimLab provides the software framework and interface to the robot for Team SNU. The company makes the complete software and hardware solutions for the robotics research, development, and educational communities. SimLab’s products include RoboticsLab™(robotic system modeling tools and real-time dynamics simulation SDK) and RealtimeRobotics™(real-time robot control SDK), as well as robot HW platforms: Allegro Dog/Arm/Hand™(quadruped, manipulator, and 16-DOF robotic hand).
Basic Feature
Stable Walking with Human-Friendly Scale, Mission Capability using Adaptive Gripper, Powerful Dual PC-level Computing with Intel NUC, Various Sensing with Force/Torque Sensor, LIDAR/IMU/Camera, Full ROS Support with 3D CAD data and Open-Source SDK, DYNAMIXEL PRO based Modular Design with Full Metal Body, Best for SLAM, Locomotion, Manipulation and HRI Research
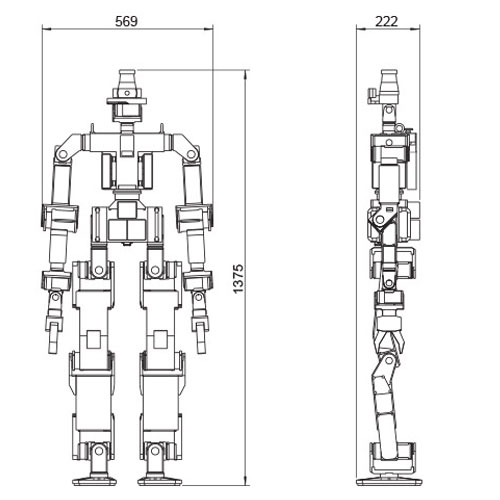
Height: 42 kgs
Weight: 137.5cm
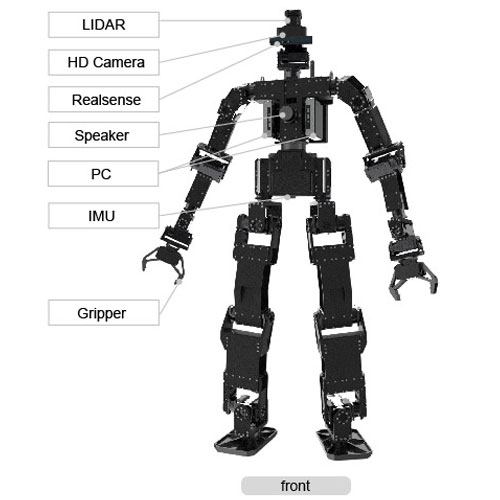
Controller (PC) : Intel® NUC with Intel® Core™ i5 Processor
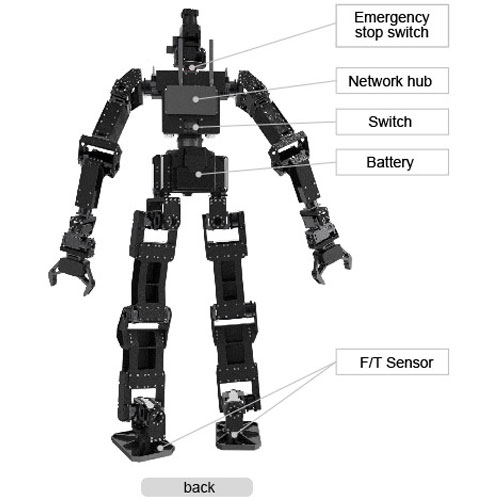
Sensor : Logitech C920 HD Camera x 1, Intel Realsense x 1, Hokuyo UTM-30LX-EW x 1, F/T Sensor : ATi Mini58-SI-2800-120 x 2, IMU : MicroStrain 3DM-GX4-25 x 1
Actuator : DYNAMIXEL PRO H-Series
DOF : Head : 2DOF, ARM : 7DOF x 2, Waist : 1DOF, Under body : 6DOF x 2, (Gripper x 2)
Battery : LIPO 22.2V 22,000mA & 18.5V 11,000mA
Control Environment : OS : Linux Ubuntu LTS (64bit), SW : ROS / GNU C++ (g++), Library : Motor Control, Manipulation, Head Control, Walking Engine, Sensor control
ROBOTIS
DYROS : DYnamic RObotic Systems Lab
MIPAL
SimLab